MIT has materialized what the CIA has wanted since early in the Cold War: deniable, unattributable, precision lethality.
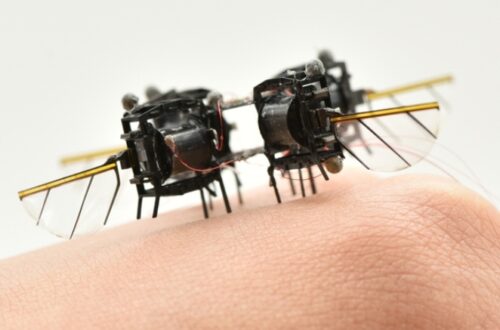
…tiny flying robots could be deployed to aid in the search for survivors trapped beneath the rubble after a devastating earthquake. Like real insects, these robots could flit through tight spaces larger robots can’t reach, while simultaneously dodging stationary obstacles and pieces of falling rubble. So far, aerial microrobots have only been able to fly slowly along smooth trajectories, far from the swift, agile flight of real insects — until now. MIT researchers have demonstrated aerial microrobots that can fly with speed and agility that is comparable to their biological counterparts.
The “humanitarian” framing is the… beard. All the “cameras and sensors” they mention as “future work” is sheer euphemism. A payload at this scale doesn’t need to be explosive; a guided needle, a directed toxin, a micro-charge at close range even inside of critical infrastructure.
The evolution from surveillance drone to armed drone to precision kinetic strike happened over roughly two decades. In terms of recent Lebanon and Caribbean strikes, we’re talking about people who market the R9X Hellfire (“Ninja”) blades as precision reducing collateral damage — amputation and destruction as humanitarian language.
Same rhetorical pattern here.
The argument that smaller and more precise is more ethical has been the justification for every escalation in targeted killing capability starting even before “Tarzon” (TAllboy, Range and aZimuth ONly) bombs or shoulder-fired mini-nuclear “Davy Crockett” rockets were claimed to be how America should win the Korean War cleanly.

This new technology announcement compresses the “precision” death timeline even more significantly because:
- Scale advantage: A paperclip-weight robot is essentially undetectable. No radar signature. Visual acquisition nearly impossible.
- Penetration capability: Explicitly designed to go where “traditional quadcopters can’t” — through rubble, gaps, screens, gates, grills, broken windows
- Autonomous targeting: The saccade movement they’re celebrating mimics how insects localize and identify — that’s targeting behavior, not just navigation
And look at the funding: Office of Naval Research, Air Force Office of Scientific Research. The search-and-rescue framing is a dual-use press release. The money trail tells you the most likely uses and customers.
The CIA failed in the 1970s to get their Insectothopter (let alone robotic birds of Project Aquiline) operational, for precisely the reason this MIT team solved: crosswind instability.
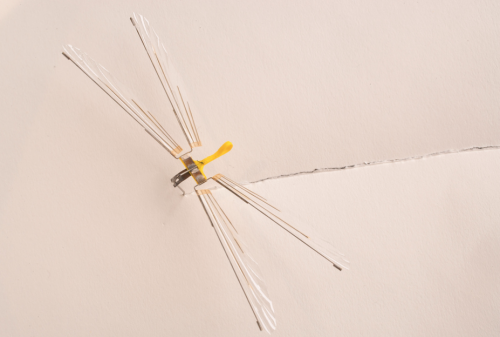
The 1970s robotic dragonfly design couldn’t handle more than a light breeze, an important context for everything MIT just demonstrated:
- Wind disturbances of >1 m/s handled
- Aggressive maneuvers with <5cm trajectory deviation
- Autonomous control (AI) architecture that compresses decision-making to distributed and real-time
Sarah Bergbreiter explicitly notes in the news release by MIT that while the controller still runs externally, they’ve demonstrated onboard execution.
“This work is especially impressive because these robots still perform precise flips and fast turns despite the large uncertainties that come from relatively large fabrication tolerances in small-scale manufacturing, wind gusts of more than 1 meter per second, and even its power tether wrapping around the robot as it performs repeated flips,” says Sarah Bergbreiter, a professor of mechanical engineering at Carnegie Mellon University, who was not involved with this work. “Although the controller currently runs on an external computer rather than onboard the robot, the authors demonstrate that similar, but less precise, control policies may be feasible even with the more limited computation available on an insect-scale robot. This is exciting because it points toward future insect-scale robots with agility approaching that of their biological counterparts,” she adds.
That’s the tell.
External computation means tethered, lab-bound demonstrations with oversight. Onboard computation means operational without oversight. She’s essentially confirming a roadmap to fly around and find out.
Search-and-rescue framing isn’t just cover for academic institutions appropriating funds, it’s how the Lincoln Laboratory gets graduate students to create weapons without moral injury or considering what happened when MIT’s death machines, known as Operation Igloo White, illegally destroyed Cambodia (Operation Menu).